Having had a Yaroze since they were first
released in the UK, I’ve now finally gotten around to setting up a home
page. Attached are the
code
and dissertation
for my final year project that enabled me to successfully complete a Masters
Degree with the Open University. The
project uses the Yaroze Playstation to evaluate the performance of Scott
Penberthy and Daniel
Weld’s partial-order UCPOP
Artificial Intelligence Planning Algorithm*
against a Dynamic Environment.
The evaluation Environment constructed on the
Yaroze consists of an Agent ![]() that
aims to apply Actions to manipulate the Environment into a desired Goal State,
which in this case was to enable the Agent to reach an Exit location by
overcoming obstacles in its way. The
Agent generates a Plan by adding together a series of Actions such as Moving to
a Location, Picking up a Key, or Opening a Door, that ultimately achieve the
Preconditions of reaching the Goal State – e.g. the Agent arriving at the Exit
location.
that
aims to apply Actions to manipulate the Environment into a desired Goal State,
which in this case was to enable the Agent to reach an Exit location by
overcoming obstacles in its way. The
Agent generates a Plan by adding together a series of Actions such as Moving to
a Location, Picking up a Key, or Opening a Door, that ultimately achieve the
Preconditions of reaching the Goal State – e.g. the Agent arriving at the Exit
location.
A Door, a Key and the Exit:-
![]()
![]()
![]()
The
most complex Environment scenario that the Agent has to Plan to traverse:-
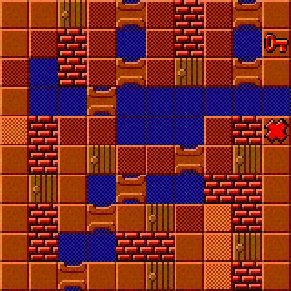
Once the Agent has constructed a Plan it
endeavours to execute it against the Environment. Against a Static Environment a Plan that achieves the Agent Goal
will always execute successfully as Agent Actions are the only means of changing
the Environment State – there are no outside influences. But the Environment being evaluated is
Dynamic rather than Static and the Agent may therefore find that the
Environment State has changed since its Plan was generated. With the Environment in a changed State the
Agent’s Plan may well become outdated and fail as the Preconditions for
executing the remaining Actions no longer exist. In this situation the Agent is forced to recover from the failure
by re-generating a Plan to meet the outstanding Preconditions of the Goal
State. The Dynamic events within the
Environment are represented by Bridges that raise and lower automatically,
thereby enabling or barring the Agent’s movement over stretches of water.
A Bridge:-
![]()
Another important concept that the project
considered was that of Time. Classical
AI Planning theory assumes that the acts of generating a Plan and applying
Actions are executed instantaneously.
This isn’t the case in the real-world and the project therefore assigns
a Time Cost to both Plan generation (the Time it takes to construct a Plan) and
Action execution (the Time it takes to apply the Effects of an Action to the
Environment). The abstract concept of
‘Turns’ is used to represent the passage of Time.
The project evaluated the implementation of the
UCPOP algorithm against a number of differing scenarios. Three factors were varied to allow data
about Plan generation and execution to be gathered from 27 scenarios. The three factors were:-
·
The complexity of the Environment, represented
by the percentage of accessible/inaccessible locations plus the number of
objects within the Environment.
·
The rate at which Dynamic events occurred within
the Environment.
·
The location at which the Agent started the
scenario.
From each of the scenarios metric information
about the number and complexity of the Plans constructed by the Agent was
gathered for analysis.
Technically, the project includes:-
·
An implementation of the UCPOP AI Planner that
allows the Agent to generate Plans to meet its Goals.
·
A best-first, depth limited, memory constrained
search algorithm that the Agent uses for path-finding around the Environment.
·
Code to execute the Plan, once it has been
generated, against the Dynamic Environment.
The project does NOT include:-
·
Optimised code.
The emphasis of the project was on academic research rather than the
implementation of optimised code. The
code is merely a means to extract the scenario data for analysis and deduction
in the Dissertation.
·
The Metrowerks Linker also gave me a great deal
of grief when passing parameters to a function in a separate C source
file. This was overcome with a botch
using global variables. (Effective, but
not particularly graceful!).
Please feel free to drop me an email if you have
any questions.
Regards,
Brian Warner
Email: bwarner@dial.pipex.com
Last
Updated: 29 December 2001.
* Penberthy, J.S. and Weld, D.S. (1992) UCPOP: A
Sound, Complete, Partial Order Planner for ADL, Morgan Kaufmann in Principles
of Knowledge Representation and Reasoning – Proceedings of the Third
International Conference.